* 정보이용 탐색 (informed search)
• State space가 매우 커질 경우 → uninformed search가 효과적이지 않음 (메모리, 시간 비효율)
• 맹목적 탐색으로 해를 찾기 어렵거나 시간이 오래 걸리는 문제
• 상태 공간의 정보를 이용하여 모든 노드를 탐색하지 않고 해를 찾는 방법
예시) 휴리스틱 탐색 (heuristic search), 언덕 오르기 방법, 최상 우선 탐색, 빔 탐색, A* 알고리즘 등
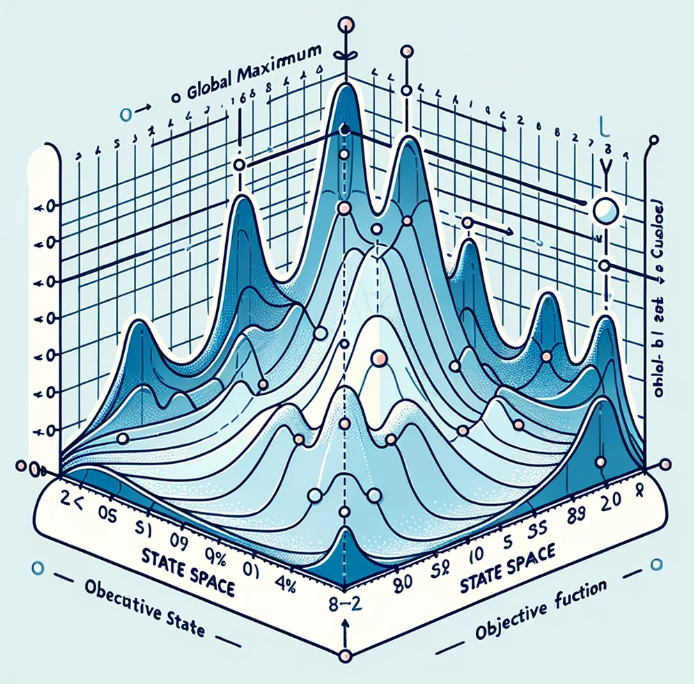
• 탐색 공간에서의 해 (solution) 찾기
- Global maximum
- Local maximum
• Local maximum을 찾는 알고리즘
- 언덕 오르기 방법(hill climbing method)
- Simulated annealing
- Local beam search
- Genetic algorithms
- Best-first search
• Global maximum을 찾을 수 있는 알고리즘
- A* search
* 언덕 오르기 방법(hill climbing method)
- 지역 탐색(local search), 휴리스틱 탐색(heuristic search)
- 현재 노드에서 휴리스틱에 의한 평가값이 가장 좋은 이웃 노드 하나를 확장해 가는 탐색 방법
- 현재 노드 선택 -> 현재에서 가장 높은 값을 갖는 이웃을 선택하여 현재보다 값이 크면 현재 노드를 이웃 노드로 선택 -> 전 과정을 반복하되, 이웃 노드가 현재 노드보다 크지 않으면 종료
- 국소 최적해(local optimal solution)에 빠질 가능성 있음

* Best-first search 방법
- 일반적인 트리 탐색 (tree-search) 또는 그래프 탐색 (graph-search) 알고리즘으로 평 가 함수 h(n)에 따라 탐색을 확장
- Heuristic function : f(n) = h(n)
- 특징 : Depth-first search와 유사한 방법, 현재에 가장 좋은 것으로 선택하는 방법
- Non-optimal, Incomplete
- 확장 중인 노드들 중에서 목표 노드까지 남은 거리가 가장 짧은 노드를 확장하여 탐색
- 남은 거리를 정확히 알 수 없으므로 heuristic 사용

* A* 탐색 알고리즘
- estimated total cost 𝑓' 𝑛 을 최소로 하는 노드로 확장해 가는 방법
- 𝑓(𝑛) ∶ 노드 n 을 경유하는 전체 비용
- 현재 노드 n까지 이미 투입된 비용 g(n)과 목표 노드까지의 남은 비용 h(n)의 합
• 𝑓 (𝑛) = 𝑔(𝑛) + ℎ(𝑛)
- ℎ(𝑛) : 남은 비용의 정확한 예측 불가
• ℎ'(n) : ℎ(𝑛) 에 대응하는 휴리스틱 함수(heuristic function)
𝑓'(𝑛) ∶ 노드 n 을 경유하는 추정 전체 비용
• f '(𝑛) = 𝑔(𝑛) + ℎ'(𝑛)
- optimal, complete
: ℎ(𝑛) 이 admissible heuristic 이면 optimal // Admissible이란? 주어진 state에서 goal에 도달하기까지 비용이 높게 추산되지 않음, ℎ (𝑛) ≤ 목적지까지의 비용

'인공지능' 카테고리의 다른 글
| [인공지능] Q-learning으로 로봇의 경로찾기 (0) | 2024.05.28 |
|---|---|
| [인공지능] MINST DATA로 RBM 학습 시키기 (0) | 2024.05.09 |
| [인공지능] Uninformed Search (0) | 2024.04.10 |
| [인공지능] 인공지능이란 무엇인가? (0) | 2024.04.10 |
| [인공지능] Adversarial Search (0) | 2024.04.02 |



