안녕하세요 오늘은 로봇 계획의 사례와 알고리즘 구현에 대해 알아보고자 합니다.
로봇 계획의 응용 사례로는 주로 길찾기와 청소로봇이 있습니다. 이러한 응용 분야에서 다양한 알고리즘이 사용됩니다.
길찾기 (Path Planning)
1. A 알고리즘*: A* 알고리즘은 가장 널리 사용되는 길찾기 알고리즘 중 하나입니다. 이 알고리즘은 휴리스틱을 사용하여 최단 경로를 찾기 위해 Dijkstra 알고리즘과 Greedy Best-First Search의 요소를 결합합니다. A* 알고리즘은 정적 환경에서 특히 유용하며, 게임 산업, 로봇 경로 계획, 지능형 도시 교통 시스템 등에서 많이 사용됩니다.
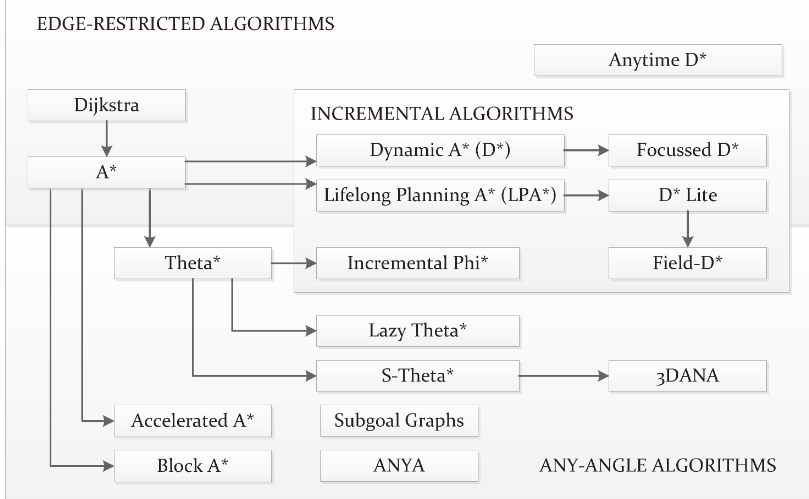
2. Dijkstra 알고리즘: Dijkstra 알고리즘은 모든 가능한 경로를 계산하여 최단 경로를 찾습니다. 이 알고리즘은 메모리 사용량이 많지만, 정적이고 잘 알려진 환경에서 유용합니다. 로봇의 전체 환경을 그래프로 나타낼 수 있는 경우에 적합합니다.
3. D 알고리즘*: D* (Dynamic A*) 알고리즘은 동적 환경에서 실시간으로 경로를 재계획할 수 있도록 설계되었습니다. 이 알고리즘은 이동하는 장애물이나 환경 변화에 대응하여 경로를 업데이트하는 데 효율적입니다. 따라서 자율 주행 차량과 같은 동적 시나리오에 적합합니다.
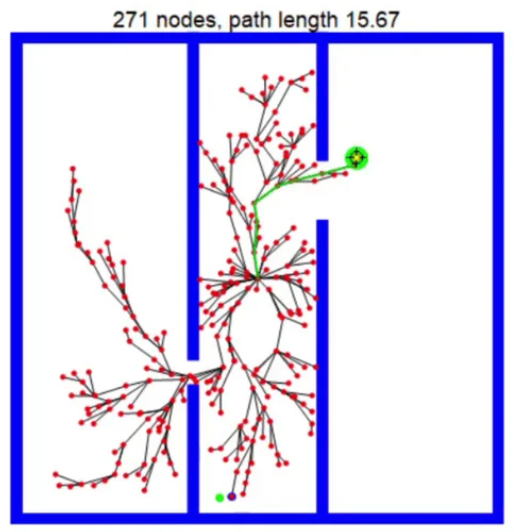
4. RRT (Rapidly-exploring Random Trees): RRT 알고리즘은 비홀로노믹 제약(즉, 위치 제약으로 통합할 수 없는 제약)을 염두에 두고 설계된 동적 경로 계획 알고리즘입니다. 이 알고리즘은 탐색 공간의 임의의 지점을 샘플링하여 빠르게 경로를 찾습니다. 비정형 환경에서 유용하며, 로봇 팔의 경로 계획 등 다양한 로봇 응용 분야에서 사용됩니다.
청소 로봇 (Robot Vacuum Cleaners)
청소 로봇에서는 주로 다음과 같은 알고리즘이 사용됩니다:
1. SLAM (Simultaneous Localization and Mapping): 청소 로봇은 SLAM을 사용하여 실시간으로 자신의 위치를 파악하고, 환경 지도를 작성하며, 이를 바탕으로 효율적인 청소 경로를 계획합니다. 이는 로봇이 처음 가보는 환경에서도 효과적으로 작동할 수 있게 해줍니다.
2. Genetic Algorithms: 유전 알고리즘은 최적의 경로를 찾기 위해 자연 선택, 교차 및 돌연변이와 같은 생물학적 진화 원리를 적용합니다. 이는 청소 로봇이 다양한 환경 조건에서 최적의 청소 경로를 찾는 데 유용합니다.
'인공지능' 카테고리의 다른 글
| [인공지능] Autoencoder로 MNIST 데이터 생성해보기 (1) | 2024.06.08 |
|---|---|
| [인공지능] Q-learning으로 로봇의 경로찾기 (0) | 2024.05.28 |
| [인공지능] MINST DATA로 RBM 학습 시키기 (0) | 2024.05.09 |
| [인공지능] Informed Search (0) | 2024.04.10 |
| [인공지능] Uninformed Search (0) | 2024.04.10 |



