오늘은 Robot Setup 하는 방법에 대해 포스팅을 하고자 합니다!
먼저, 저희가 사용할려는 모델은 TurtleBot3 라는 로봇 모델입니다!
자세한 디자인과 정보는 아래 홈페이지를 참고하시면 됩니다
https://emanual.robotis.com/docs/kr/platform/turtlebot3/overview/
터틀봇3
emanual.robotis.com

저희는 아래의 메뉴얼로 진행해야 합니다
1. SD CARD 삽입
SD Card가 VM ware에서 인식되지 않는다면, 가상환경 Ubuntu 실행 전에 “Edit Virtual Machine setting”
-> “USB Controller” 부분에 USB 3.1과 “Show all USB Input devices” 체크 되어 있는지 확인해야 합니다.

2. SBC Setup
메뉴얼을 참고하여 진행을 합니다.
단, 버전은 Noetic로 선택을 하고 진행을 합니다.
https://emanual.robotis.com/docs/en/platform/turtlebot3/sbc_setup/#sbc-setup
ROBOTIS e-Manual
emanual.robotis.com

3.2.2에서 라즈베리 파이 버전에 따른 image 파일 다운로드 -> Robot에 사용하는 라즈베리 파이4 이므로
“Raspberry Pi 4B (2GB or 4GB)” 파일 다운로드
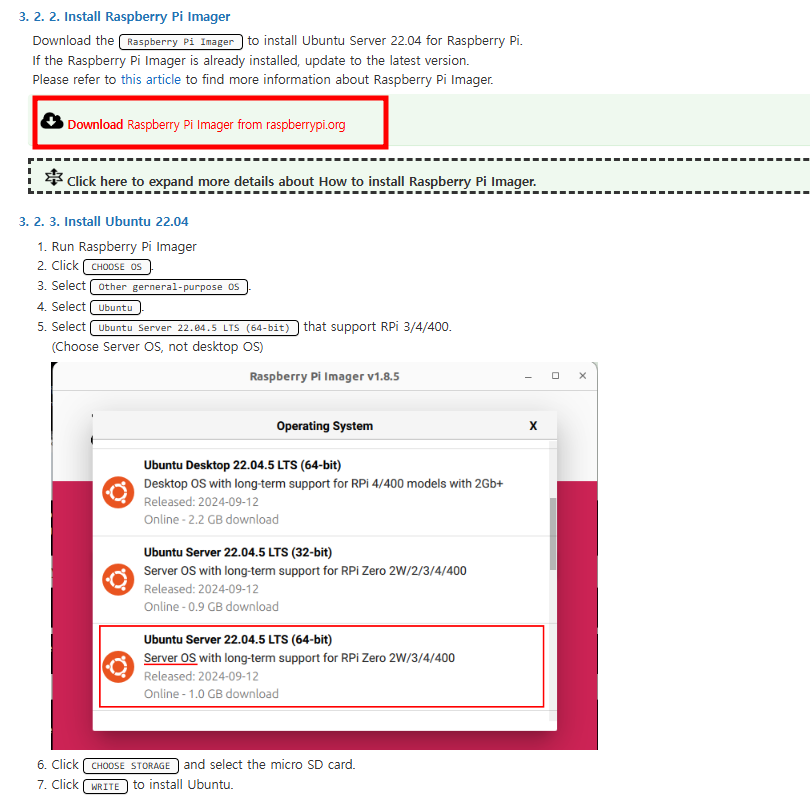
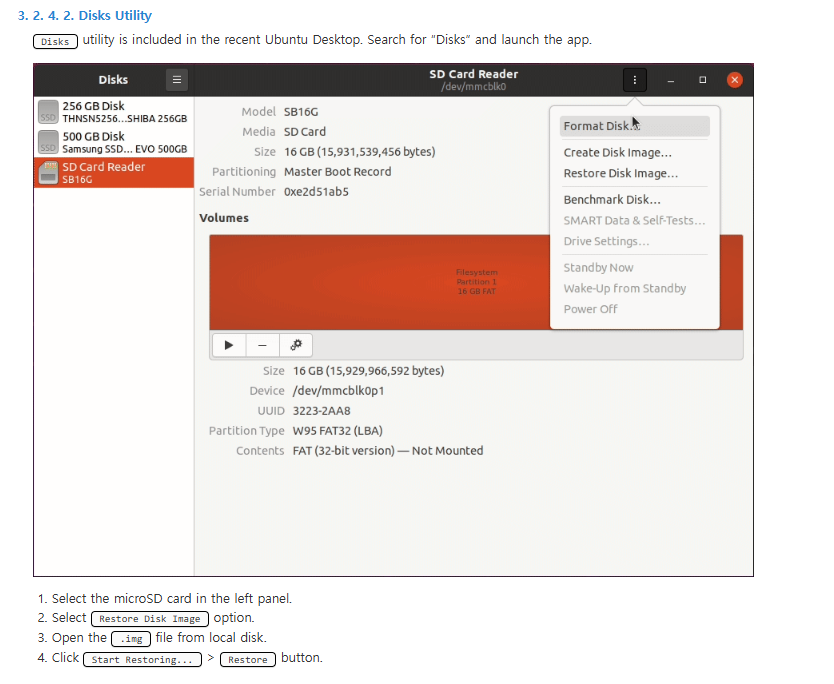
3.2.4 Burn the image file에서 2가지 방법 중 3.2.4.2 Disks Utility로 설치 진행
3.2.6까지 완료가 된다면 3.2.7부터는 SD Card를 Robot의 라즈베리파이에 삽입하여 진행한다.
3.2.7의 ROS_DOMAIN_ID는 PC Setup에서 설정한 값과 동일 하게 설정 해야한다.
3. OpenCR Setup
Noetic으로 설정한 다음 아래 메뉴얼 대로 진행을 한다.
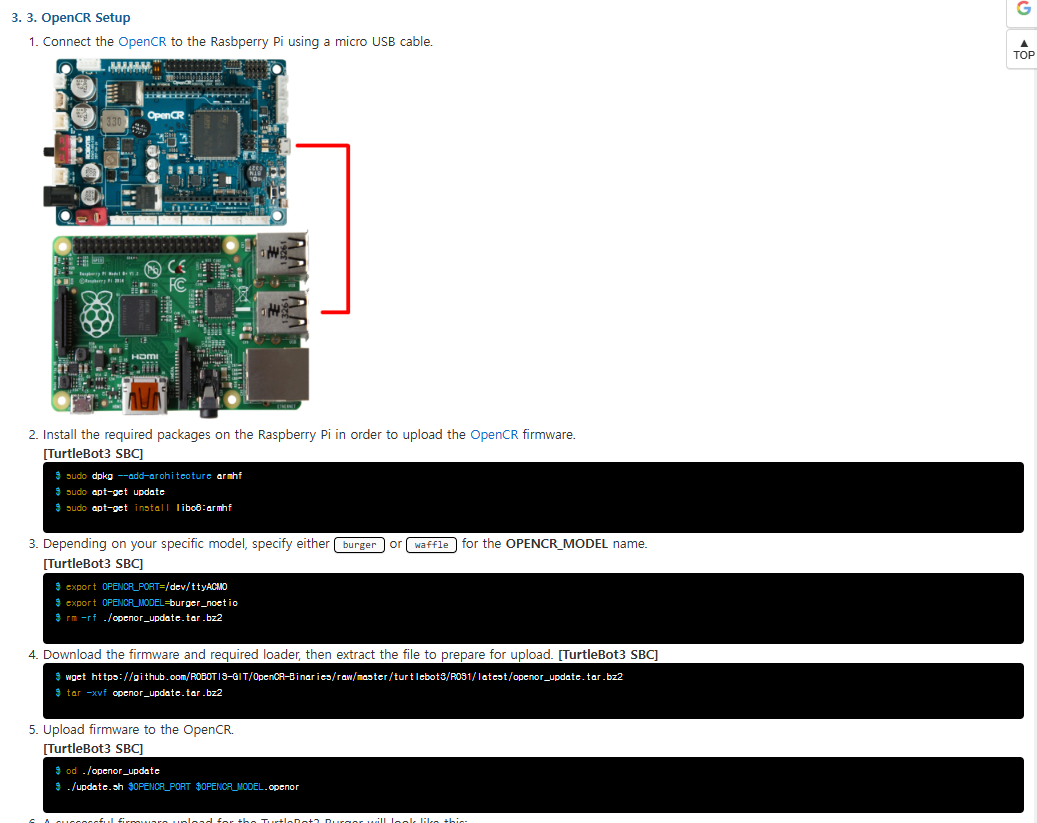
3.3의 5번까지 진행 후 정상 설치가 된다면 3.3의 6번(홈페이지 참고)과 같은 화면이 나온다.
로봇에서 소리가 나면 정상, 둘 중 하나라도 안되면 정상 설치가 된 것이 아니다.
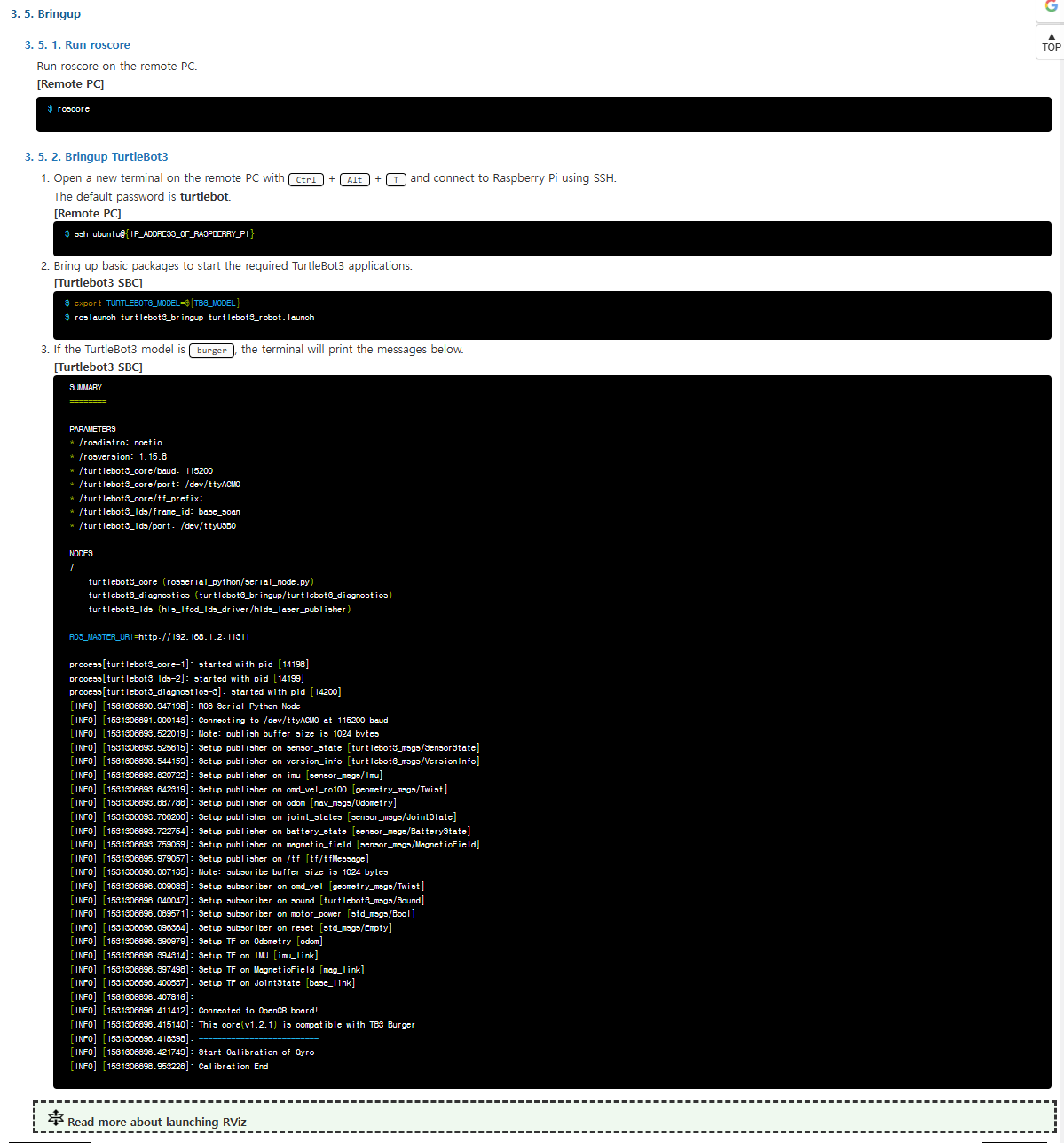
4. Bring Up
3번까지 진행하면서 화면과 같이 출력이 된다면 로봇 셋업은 완료 되었다.
오늘은 이렇게 로봇 셋업하는 것에 대한 내용을 글로 적어보았습니다.
감사합니다!
'로봇제어' 카테고리의 다른 글
| [로봇제어] VMWARE를 설치 + VMWARE에 UBUNTU를 설치하자 #2 (1) | 2025.03.22 |
|---|---|
| [로봇제어] Ubuntu를 설치하자 #1 (0) | 2025.03.13 |

